
MR03 ASF 2.4 GHz
ASF band setting changes the characteristic of the steering servo and motor control. ASF band is different than the standard steering servo in that it has a digital servo.
For the steering, there are 5 parameters that can be changed to tailor the steering response. For the motor speed control, the drive frequency can be changed as well as 2 other parameters. Changing these parameters actually affects how the car feel and perform. At first glance, most of the parameter seems to be redundan since most high end radios already have these features like servo speed, punch and dead band. However, they are different in that the drive curves on the radio affects the control that is sent to the servo. The HG manager controls how the servo respond to a command. When a command is sent from the radio to move the servo to a new position, how fast the servo accelerates and how it slows down when it reaches the new position is controlled by the HG manager. Like any control system, there is lag and overshoot. Is a compromise. If the servo moves too fast to the new position, there would be overshoot. If it moves too slow, there would be too much lag. Since the servo is tied to the steering wheel, how the servo moves affect the handling of the car.
On the MR03, three additional values can be change that is not available on MR02. These are BAKTIM, ST.GAIN and TH.GAIN. BAKTIM setting is the main reason to get the MR03 board. It allows you to eliminate the wait in neutral before the reverse lock out is lifted. ST.GAIN and TH.GAIN are used with the gyro to prevent spin outs.
It took a while to try each of the setting, and the result is subjective, but there is definitely a change on the handling of the car. I ran the car on a small indoor track in the computer room. Track is basically an L shaped track. I have been running on it for a while, so I know how the car behaves on each corner by heart. The change in handling of the car with each setting definitely made a difference.
For changing the settings on the ASF board, you need a ICS cable and a program for the computer. Here is the link for the ICS program and manual. Go to the center of the page. You can get an ICS cable, or make your own. Cable from Kyosho is $74. Making your own, parts would probably cost $20-30. Unless you have all the parts laying around, with the time and effort involved, you may be better off buying the cable. A better idea is to get the portable hand held programmer. Cost is $90, but is more portable than a laptop.

Gain
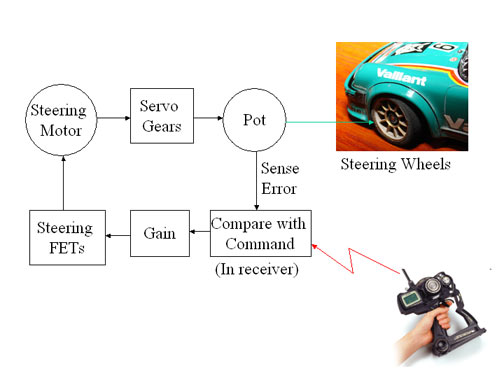
What it is: When the receiver sense that the steering wheels are not pointed to where they should be pointing at, gain controls how much power to apply to the servo motor to bring the wheels back in line..
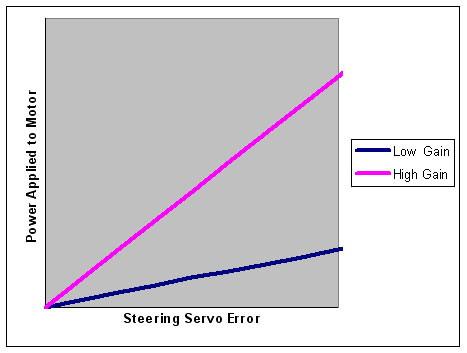
Effect: It has a small effect on handling. The higher the gain the more oversteer during the turn in part of the corner.
A good setting: Setting of 1 is good since the rest of the parameters are set to a more aggressive setting.
Speed
What it is: Changes the maimum speed that the servo will travel at.
Effect: Has the biggest effect of all the settings. This is the "mind control" setting. At high setting, car responds so quick that it just appears to follow your though. As soon as you think it, the car is already turning.
A good setting: Setting of fast is good. Take maximum advantage of the ASF board. Setting of 1 is like the standard mini-z board.
Punch
What it is: When the receiver sense that the steering wheels are not pointed at where they should be at, it tries to apply power to the servo motor to bring them in line. However, instead of applying an amount of power proportional to how much the steering wheels are off, it instantly applies a fixed amount of power to the motor as soon as the pot sense that the steering wheels are off.
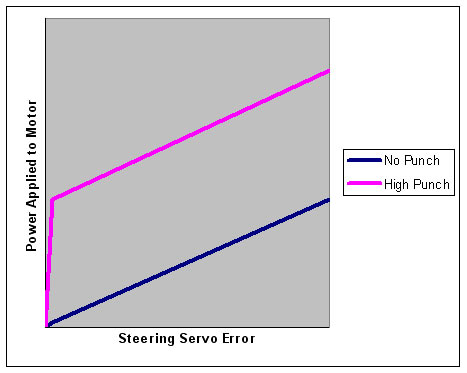
Effect: It has a medium to large effect on handling. Low setting cause slugish steering that results in understeer. With high setting, car turns faster and results in oversteer. This has a range of 1 to 10.
A good setting: After setting the rest of the value, this can be used to set the oversteer / understeer characteristic of the car. Setting of 6 or 7 is good depending on how you like the car to drive.
Dead Band
What it is: Changes how much the steering wheels can be off before the receiver kicks in the correct the steering wheels.
Effect: It has a medium effect on handling. The lower the value the more precise the servo is. At first, higher value seems to cause more more agressive steering. However, that is because with higher value, the servo does not move until steering is turned sufficiently. The result is that by then the steering wheel on the transmitter is moving at a good speed. So when the servo does move, it instantly move at a high speed. This is similar to a high value on the speed setting, which cause oversteer. Therefore, the car appears to be more responsive when it is not.
A good setting: Setting of narrow is good since it gives more precision to steering.
Dump
What it is: Changes how the servo brakes when it approaches the target position. smooth means servo starts to brake as it approaches the target position. over means servo brakes brake only after it reaches target position. Setting of over means the servo reaches target position sooner at the expense of overshooting the target position.
Effect: Setting of over cause strange handling. May require more experimenting to find out if over has some advantage with other settings.
A good setting: Setting of smooth is good.
Drive Freq
What it is: Changes how fast the pulse rate is on the motor speed control.
Effect: Setting of 1.2 Khz gives maximum torque and low run time. Setting of 5 Khz gives low torque and more run time.
A good setting: Use the maxium setting that will not cause spinout during acceleration out of corner.
Neutral
What it is: This is how much throttle play there is in neutral position.
Effect: Setting of narrow means power will be applied to the motor as soon as the throttle is moved a little. Wide means you have to move the throttle more before the car starts to move.
A good setting: If you are using throttle preset to go into reverse, then narrow setting is ok. Otherwise, setting it as wide is a good idea. Many times, when you go from first reverse command to second reverse command, overtravel of the trigger will put the car into forward again. The accidental overtravel means the car will not go into reverse when you give the second reverse command.
V Inertia
What it is: When you cut the throttle, power to the motor diminish slowly to minimize effects of braking from motor magnets.
Effect: Modified motor with powerful magnets tends to have large braking effect when it is coasting. V Inertia can overcome that.
A good setting: This is a personal preference. AM and AD band does not have this feature, so their equivalent setting would be OFF. Coming into a corner, it may be helpful to cut the power early, and let the car glide into corner while you prepare to engage the brakes at the right time. A strong setting will let the car glide without slowing down too much while you are getting ready to brake.
BAKTIM
What it is: This is the reverse lock out. Controls how much reverse delay.
Effect: How long you have to stay in neutral before the speed control allows you to go into reverse.
A good setting: Use 1. For the first generation ASF that was used on MR02, to get to reverse, you have go into reverse once, which actuates the brakes, then wait .2 seconds in neutral before going into reverse again, where the second time will drive the car in reverse. In practice, due to either radio or car processor speed,. you have to wait up to half second in neutral before getting into reverse. Otherwise, you are still in braking mode. This has been a major point of irritation running the ASF during a race where half a second at the apex of a corner means other will crash into you.
ST.GAIN
What it is: This works with the optional gyro. It controls the amount of automatic steering correction when using the gyro.
Effect: When the car goes into a skid, the gyro is suppose to use steering to correct the yaw rate of the car.
A good setting: It is assumed that using maximum gain will prevent spin out. Need more experimentation on this one.
TH.GAIN
What it is: This works with the optional gyro. It controls the amount that the throttle is cut when using the gyro.
Effect: When the car goes into a skid, the gyro will cut the throttle to slow down the car.
A good setting: Most likely the less throttle interference the better. Low number should be better. Need more experimentation on this one.
Difference Between Gain and Punch
On a standard servo, if you force the steering wheels to turn, you can feel the gradual increase in resistance of the motor trying to center the wheels as it is moved away from center more. That is the gain of the feedback working. The motor torque is proportional to how much the wheels are off of where they should be at. More gain means motor torque ramps up faster as the wheels are turned away from where they should be. Problem with just using just gain is that if you only turn the wheels only a tiny amount, the servo motor only puts out a tiny amount of torque to return it to center. So there will always be a steering error because if the wheels are moved a little bit, the controller only sends a little bit of torque to the motor. That torque may not be high enough to return the wheels to where they should be because of steering linkage friction, wheels will be stuck at the off position. You can turn up the gain to reduce the steering error. However, if the gain is turned up too high, the servo motor will try to over correct and overshoot. You will end up with jerky oscillation kind of like trying to drive the car in a straigh line with a overly sensitive steering. With the punch setting, as soon as the controller detects that the wheels have move off center, the servo motor immediately kicks in with a preset punch to return it back to the center. You can set the punch high to overcome linkage and road friction so steering wheel will not wander off. With the punch motor will always be growling trying to center itself perfectly.
Default Settings:
These are the default MR03 ASF settings: Gain=Mid, Speed=Fast, Pnch=2,D.Band=Narrow, Dump=Over, D.Freq=1.2kHz, Nutral=Mid, V.Inertia=Off, Baktim=1, St.Gain=90, Th.Gain=60.
.
